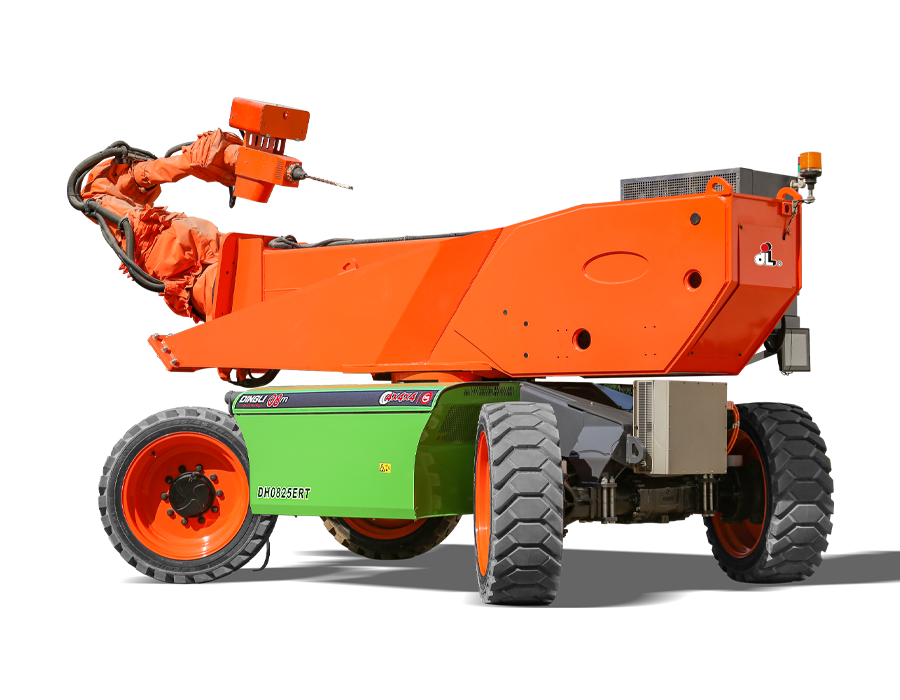
Dingli electric punching robot is based on visual following system and laser positioning target system, which can be accurately detected and controlled remotely. Through the three-dimensional positioning of drilling target and the calculation of the relative angle between the drill bit and the target plane, it can realize the recognition of target point faster and more accurately and control the movement of the robot arm to implement the complete drilling operation. It effectively solves the problems existing in traditional drilling methods, such as the inability to control the drilling spacing, adjust the angle, and adapt to the complex and changeable construction requirements on site, and truly realizes unmanned automatic drilling operation.